We have two projects: Target Tracking and Mirage Pose Estimation.
Majority of tracking algorithms are based on feature extraction and continuous availability of features. If the target is not detectable or leaves the field-of-view, we analyze the strategies that could be taken.
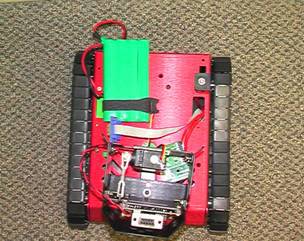
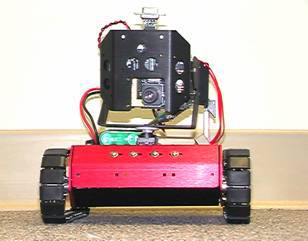
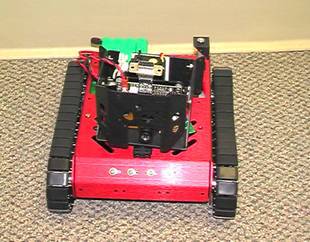
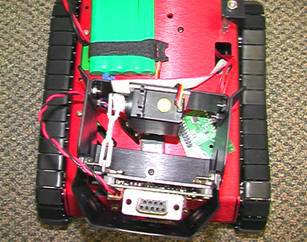
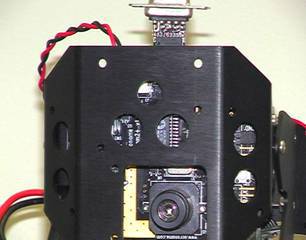
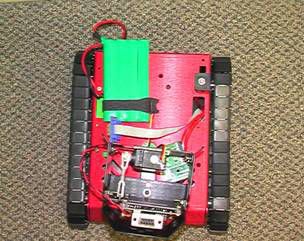
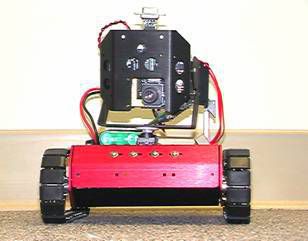
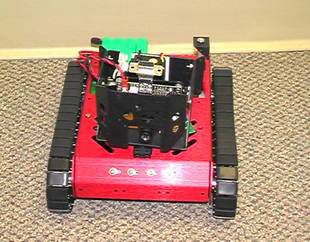
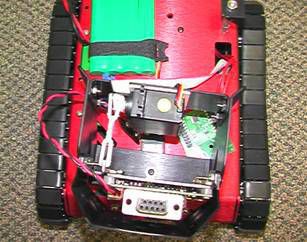
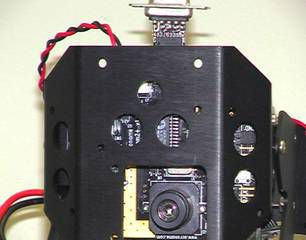
ROBOT PARTS
Robot Controller: Serializer .NET Robot Controller
Video Sensor: CmuCam2+
DESCRIPTION
In this project, we have built a robot to track color objects. This project is funded by UAH REU and sponsored by Alabama Space Grant Consortium. The goal is to be able to track an object even if the object goes out of the view of the object permanently.
STUDENTS PARTICIPATED
Jacob Hauenstein

We also developed 'Mirage' pose estimation and trajectory tracking by computing the error between 2D projection of the desired target and actual image of the target.
P U B L I C A T I O N S